Bryan LimI am a PhD student at the Adaptive and Intelligent Robotics Lab, part of the Department of Computing at Imperial College London, where I work on robotics and machine learning. My PhD advisor is Dr. Antoine Cully. Previously, I completed my MEng year at MIT, where I worked with Prof. Alberto Rodriguez and Prof. Sangbae Kim. I have an MEng in Mechanical Engineering from Imperial College London. / / Google Scholar |
|
ResearchI work at intersection of machine learning and robotics. My research aims to make AI systems more reliable and useful by making them more robust, creative, general-purpose and have the ability to continuously improve. I believe open-ended learning systems which can continously learn and generate intersting things can be a solution to this. To enable such systems, I study Quality-Diversity algorithms which encourages novelty and diversity as a key component in the process. More specifically, I am interested in the synergy between deep models (i.e. generative/foundation models) and Quality-Diversity search which can lead to self-improvement. |
News
|
Conference Papers |
|
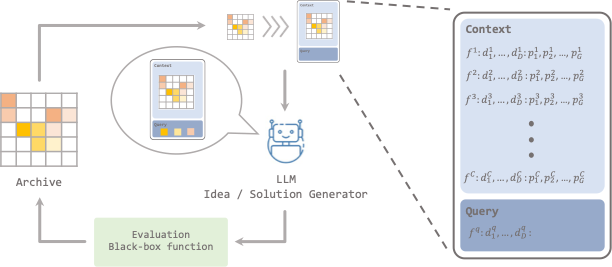
Large Language Models as In-context AI Generators for Quality-DiversityBryan Lim, Manon Flageat, Antoine Cully Conference on Artificial Life (ALIFE), 2024 (arXiv) |
|
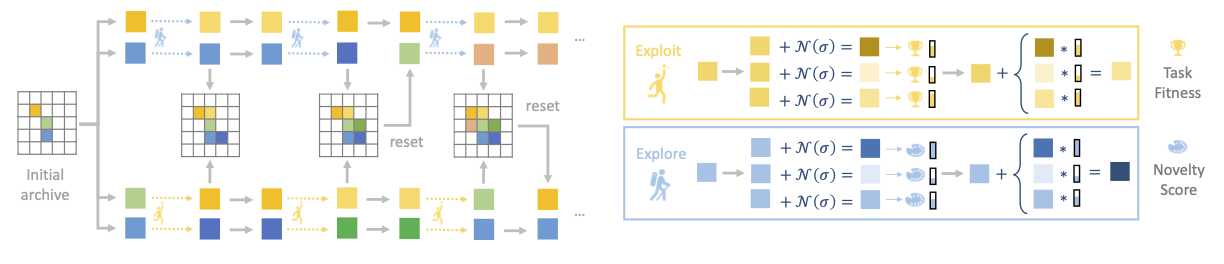
Enhancing MAP-Elites with Multiple Parallel Evolution StrategiesM.Flageat*, Bryan Lim*, A. Cully The Genetic and Evolutionary Computation Conference (GECCO), 2024 (arXiv) (project page) |
|
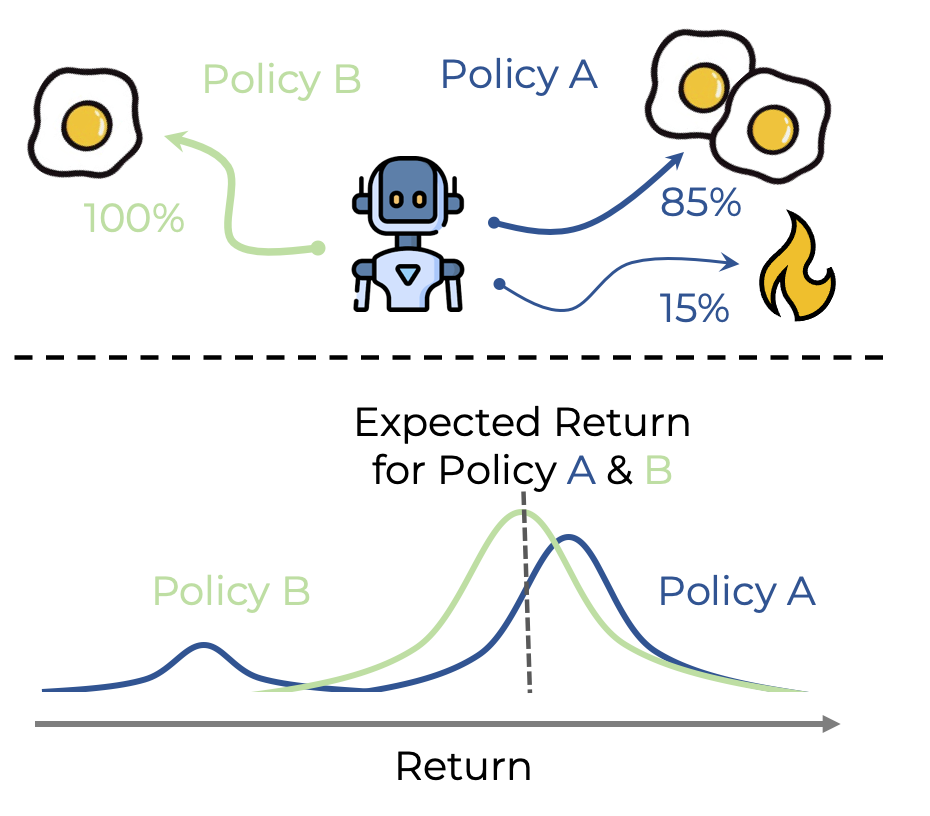
Beyond Expected Return: Accounting for Policy Reproducibility when Evaluating Reinforcement Learning AlgorithmsM.Flageat*, Bryan Lim*, A. Cully AAAI Conference on Artificial Intelligence (AAAI), 2023 (arXiv) |
|
Quality-Diversity Optimization on a Physical Robot through Dynamics-Aware and Reset-free LearningS. Smith, Bryan Lim, H. Janmohamed, A. Cully The Genetic and Evolutionary Computation Conference (GECCO) - Poster, 2023 (arXiv) (video) |
|
Don't Bet on Luck Alone: Enhancing Behavioral Reproducibility of Quality-Diversity Solutions in Uncertain DomainsL.Grillotti*, M.Flageat*, Bryan Lim, A. Cully The Genetic and Evolutionary Computation Conference (GECCO), 2023 (arXiv) |
|
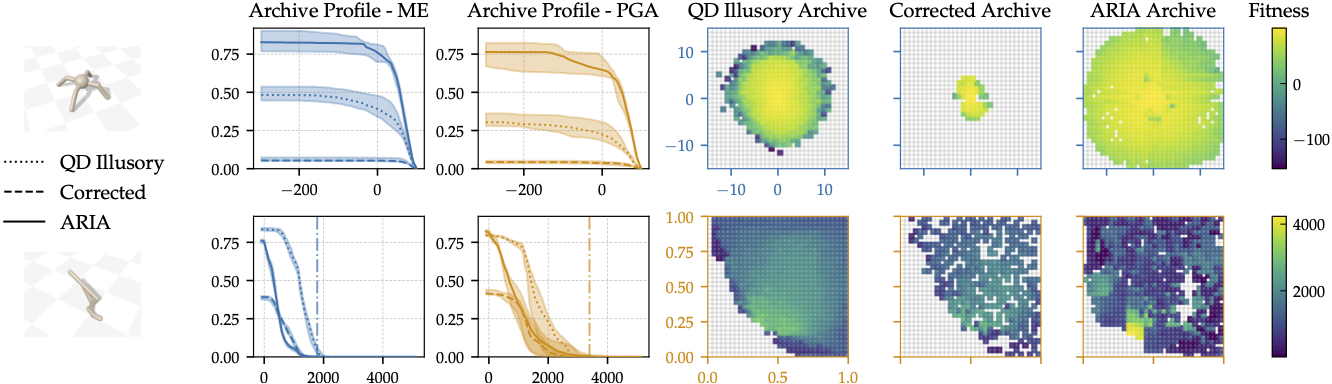
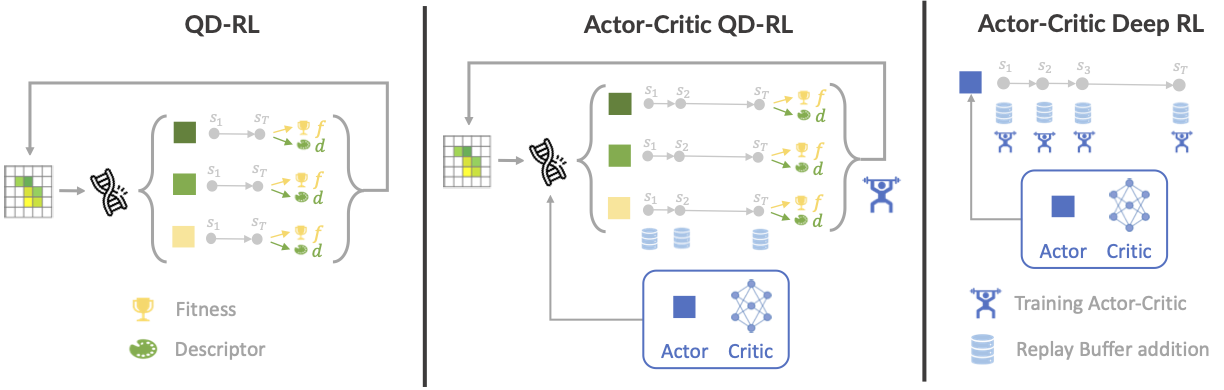
Understanding the Synergies between Quality-Diversity and Deep Reinforcement LearningBryan Lim*, M.Flageat*, A. Cully The Genetic and Evolutionary Computation Conference (GECCO), 2023 (arXiv) |
|
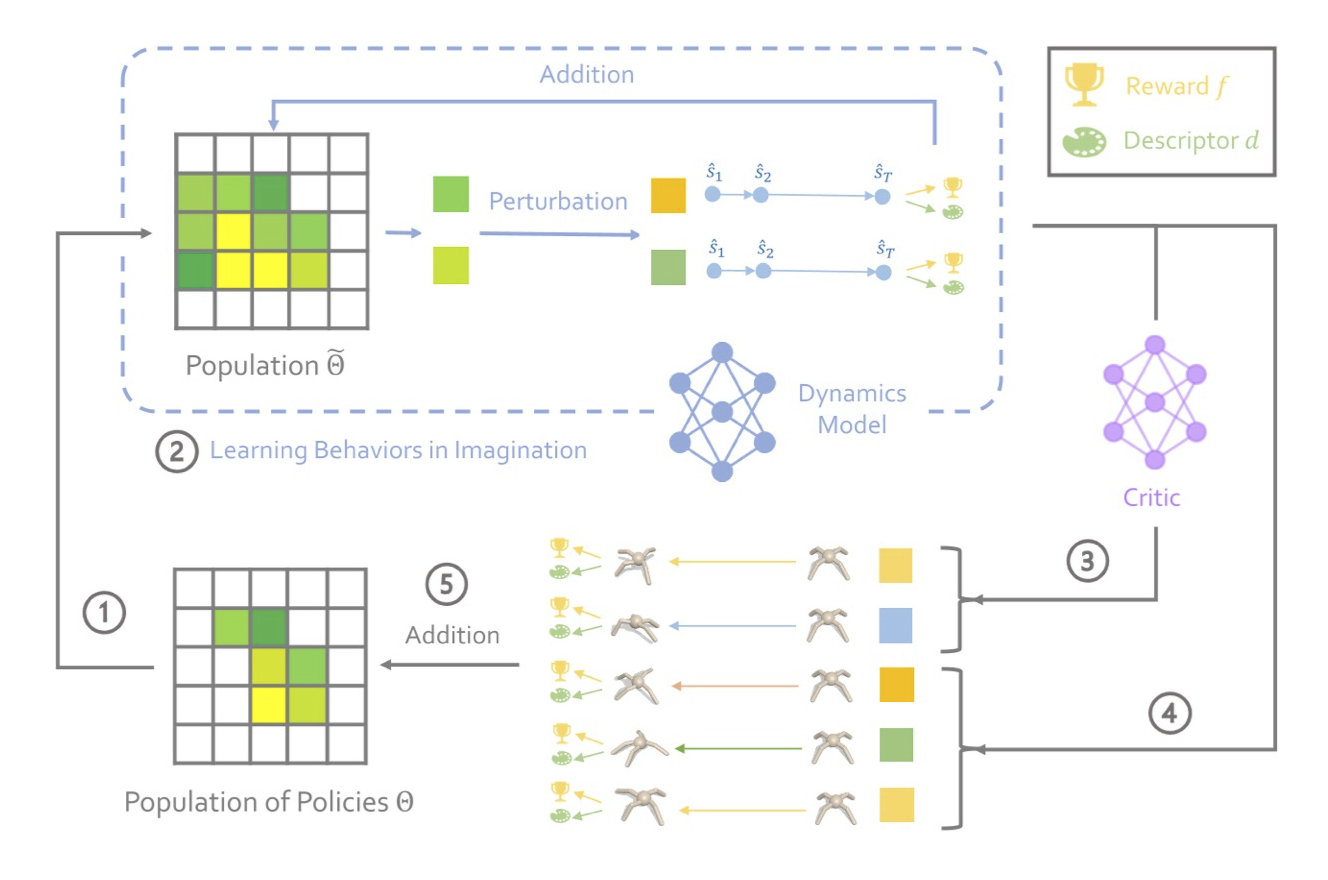
Efficient Exploration using Model-Based Quality-Diversity with GradientsBryan Lim*, M.Flageat*, A. Cully Conference on Artificial Life (ALIFE), 2023 Deep Reinforcement Learning Workshop, NeurIPS, 2022 (arXiv) (video) |
|
Neuroevolution is a Competitive Alternative to Reinforcement Learning for Skill DiscoveryF. Chalumeau*, R. Boige*, Bryan Lim, V. Macé, M. Allard, A. Flajolet, A. Cully, T. Pierrot International Conference on Learning Representations (ICLR) (Spotlight), 2023 (arXiv) |
|
Efficient Learning of Locomotion Skills through the Discovery of Diverse Environmental Trajectory Generator PriorsShikha Surana*, Bryan Lim*, Antoine Cully International Conference on Robotics and Automation (ICRA), 2023 (arXiv) |
|
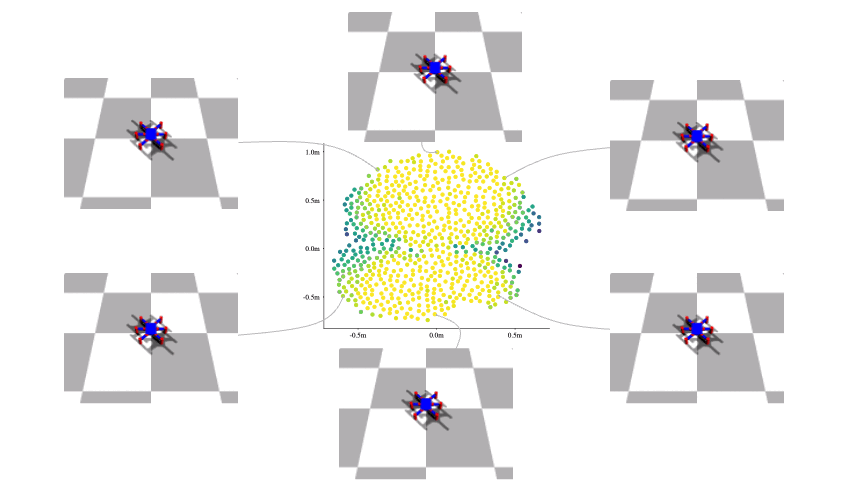
Accelerated Quality-Diversity through Massive ParallelismBryan Lim, Maxime Allard, Luca Grillotti, Antoine Cully Transactions on Machine Learning Research (TMLR), 2023 Agent Learning in Open-Endedness Workshop, ICLR (Spotlight), 2022 The Genetic and Evolutionary Computation Conference (GECCO) - Poster, 2022 (arXiv) (code) |
|
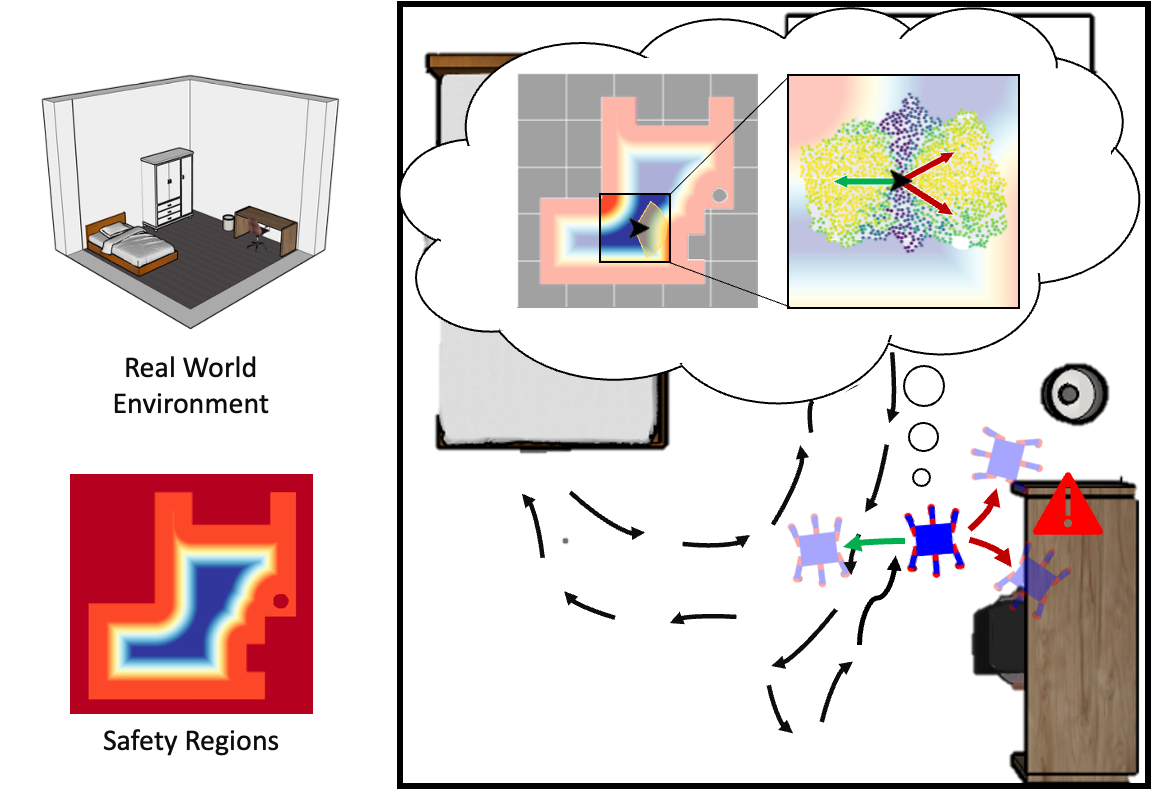
Learning to Walk Autonomously via Reset-Free Quality-DiversityBryan Lim*, Alexander Reichenbach*, Antoine Cully The Genetic and Evolutionary Computation Conference (GECCO), 2022 Agent Learning in Open-Endedness Workshop, ICLR, 2022 (arXiv) (project page) |
|
Dynamics-Aware Quality-Diversity for Efficient Learning of Skill RepertoiresBryan Lim, Luca Grillotti, Lorenzo Bernasconi, Antoine Cully International Conference on Robotics and Automation (ICRA), 2022 (arXiv) (code) (project page) |

|
Tactile object pose estimation from the first touch with geometric contact renderingM Bauza, E Valls, Bryan Lim, T Sechopoulos, A Rodriguez Conference on Robot Learning (CoRL), 2020 (arXiv) (video) (project page) |

|
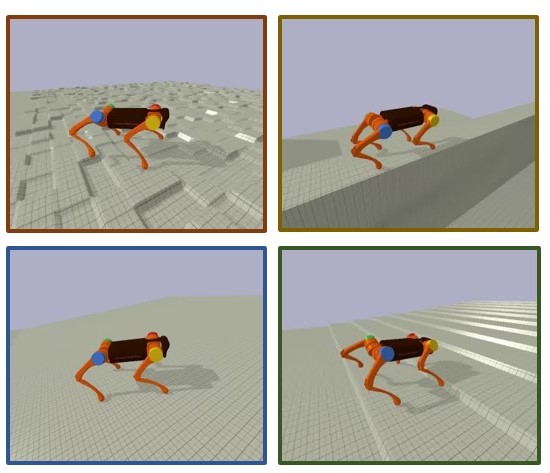
Robust Autonomous Navigation of a Small-Scale Quadruped Robot in Real-World EnvironmentsT Dudzik, M Chignoli, G Bledt, Bryan Lim, A Miller, D Kim, S Kim International Conference on Intelligent Robots and Systems (IROS), 2020 (paper) |
|
Vision aided dynamic exploration of unstructured terrain with a small-scale quadruped robotD Kim, D Carballo, J Di Carlo, B Katz, G Bledt, Bryan Lim, S Kim International Conference on Robotics and Automation (ICRA), 2020 (video) (paper) |
Journal Papers |
|
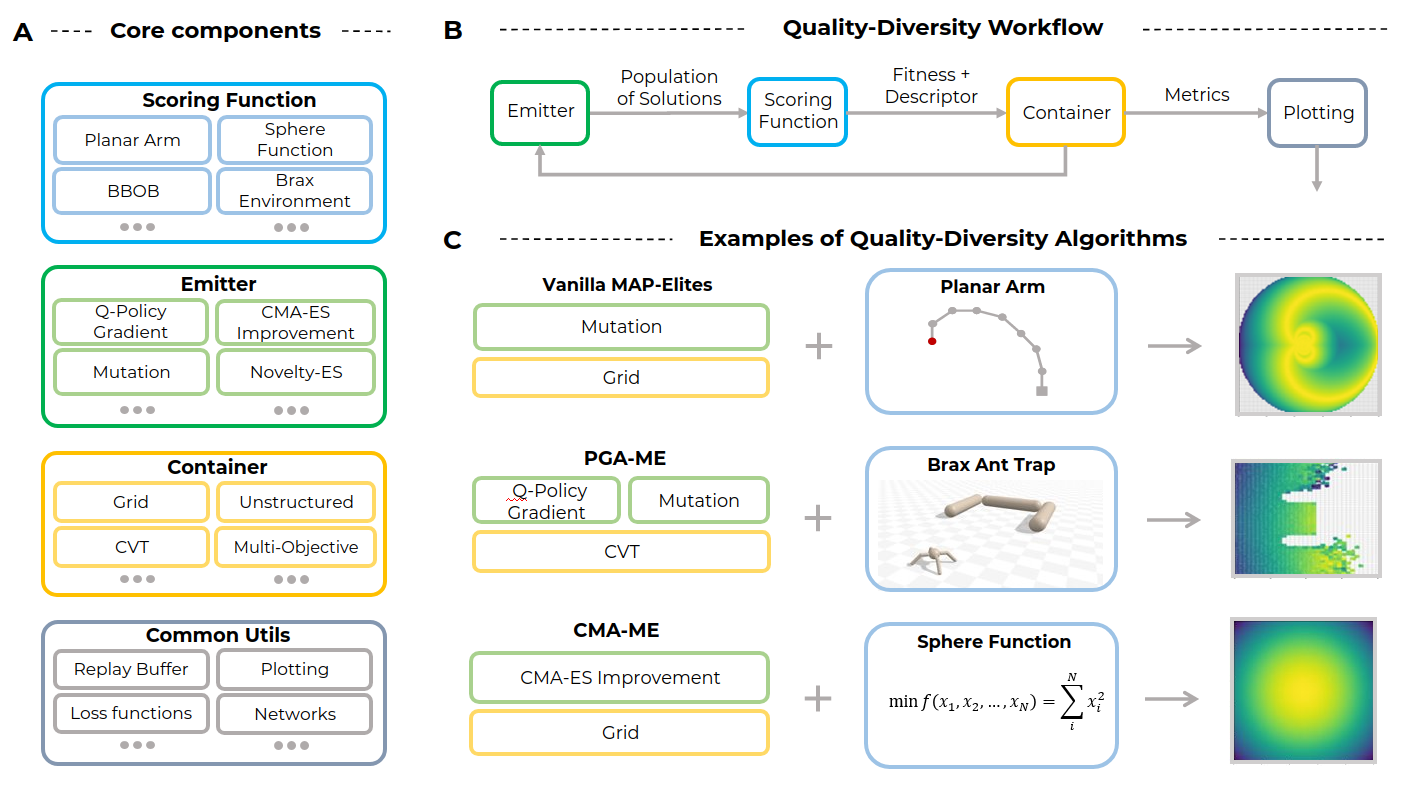
QDax: A Library for Quality-Diversity and Population-based Algorithms with Hardware AccelerationFelix Chalumeau*, Bryan Lim*, Raphaël Boige, Maxime Allard, Luca Grillotti, Manon Flageat, Valentin Macé, Guillaume Richard, Arthur Flajolet, Thomas Pierrot, Antoine Cully Journal of Machine Learning Research (JMLR) - MLOSS, 2024 (code) (paper) |

|
Online Damage Recovery for Physical Robots with Hierarchical Quality-DiversityM. Allard, S. C. Smith, K. Chatzilygeroudis, Bryan Lim, A. Cully ACM Transactions on Evolutionary Learning and Optimization (TELO), 2023 (arXiv) |
Workshop Papers |

|
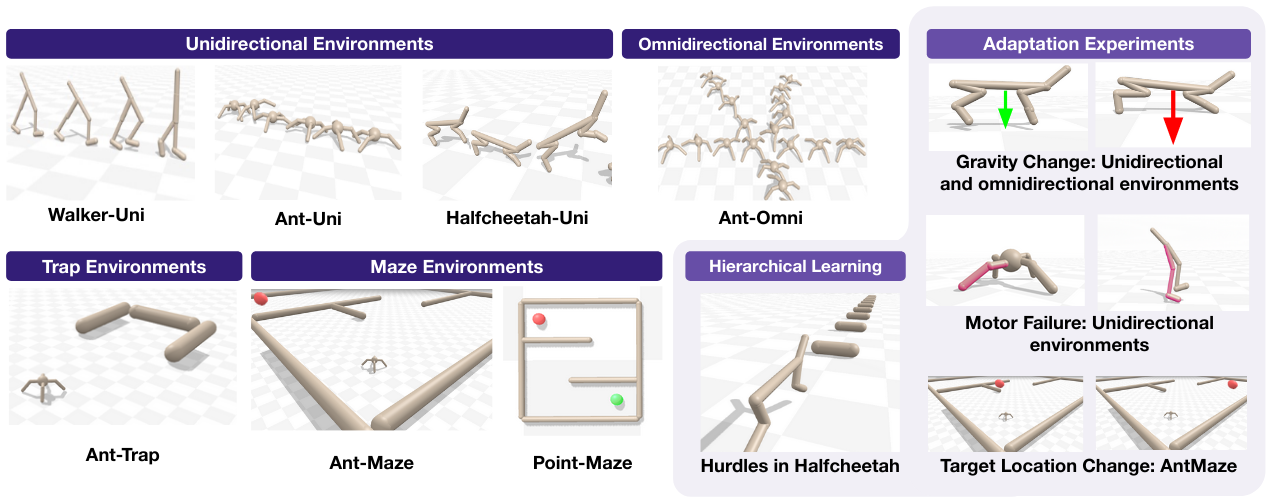
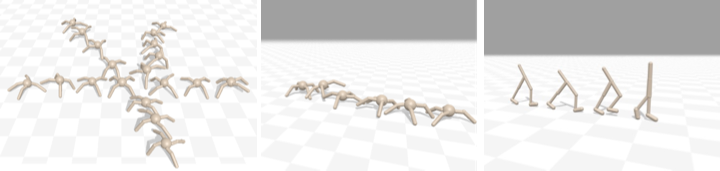
Benchmarking Quality-Diversity Algorithms on Neuroevolution for Reinforcement LearningM. Flageat*, Bryan Lim*, L. Grillotti, M. Allard, S. C. Smith, A. Cully Quality Diversity Algorithm Benchmarks Workshop, GECCO, 2022 (arXiv) |
Teaching
|
|
Design and source code from Jon Barron's website and Leonid Keselman's Jekyll fork |