Bryan LimDoing something new - working on robots and agents. Before that, I was a Principal Research Scientist at Autodesk AI Lab where I worked on foundation models and agents for Architecture, Engineering and Construction (AEC). Before Autodesk, I did my PhD in Computer Science (AI and Robotics) at Imperial College London with Prof. Antoine Cully. I completed my MEng year at MIT, where I worked with Prof. Alberto Rodriguez and Prof. Sangbae Kim and have an MEng in Mechanical Engineering from Imperial College London. My research work has focused on AI and robotics, particularly in areas such as reinforcement learning, open-endedness, quality-diversity and evolutionary computation for data and environment generation. / / Google Scholar |
|
News
|
Conference Papers |
|
Getting robots back on track by reconstituting control in unexpected situations with online learningMaxime Allard, Manon Flageat, Bryan Lim*, Antoine Cully Nature Communications, 2026 (video) (paper) |
|
Large Language Models as In-context AI Generators for Quality-DiversityBryan Lim, Manon Flageat, Antoine Cully Conference on Artificial Life (ALIFE), 2024 (arXiv) |
|
Enhancing MAP-Elites with Multiple Parallel Evolution StrategiesM.Flageat*, Bryan Lim*, A. Cully The Genetic and Evolutionary Computation Conference (GECCO), 2024 (arXiv) (project page) |
|
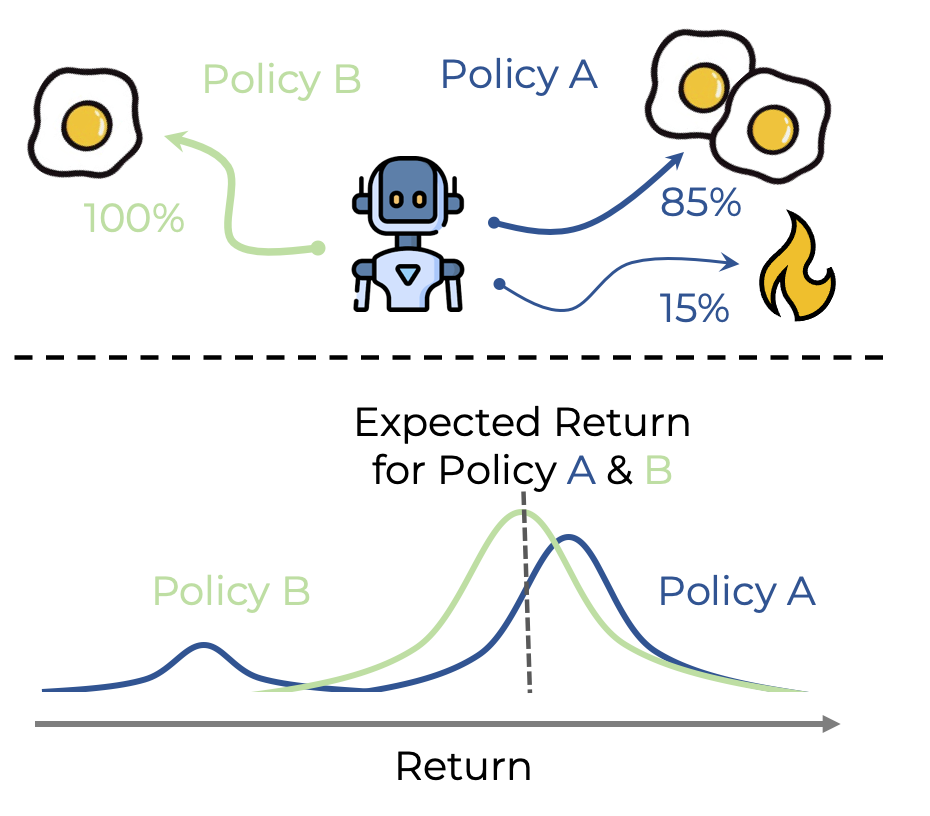
Beyond Expected Return: Accounting for Policy Reproducibility when Evaluating Reinforcement Learning AlgorithmsM.Flageat*, Bryan Lim*, A. Cully AAAI Conference on Artificial Intelligence (AAAI), 2023 (arXiv) |
|
Quality-Diversity Optimization on a Physical Robot through Dynamics-Aware and Reset-free LearningS. Smith, Bryan Lim, H. Janmohamed, A. Cully The Genetic and Evolutionary Computation Conference (GECCO) - Poster, 2023 (arXiv) (video) |
|
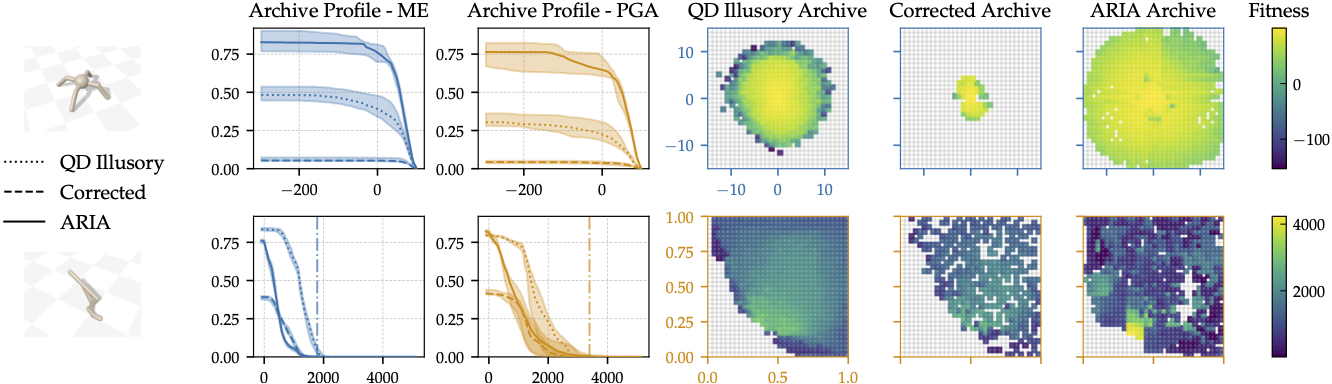
Don't Bet on Luck Alone: Enhancing Behavioral Reproducibility of Quality-Diversity Solutions in Uncertain DomainsL.Grillotti*, M.Flageat*, Bryan Lim, A. Cully The Genetic and Evolutionary Computation Conference (GECCO), 2023 (arXiv) |
|
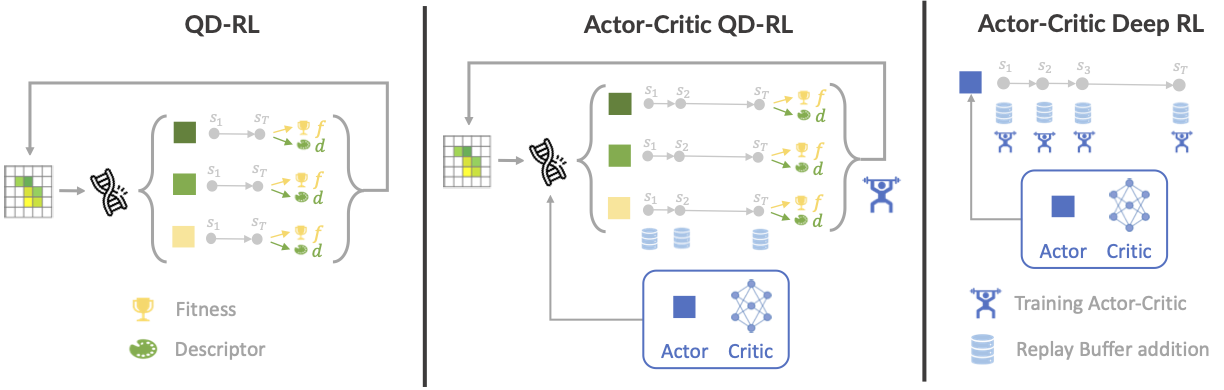
Understanding the Synergies between Quality-Diversity and Deep Reinforcement LearningBryan Lim*, M.Flageat*, A. Cully The Genetic and Evolutionary Computation Conference (GECCO), 2023 (arXiv) |
|
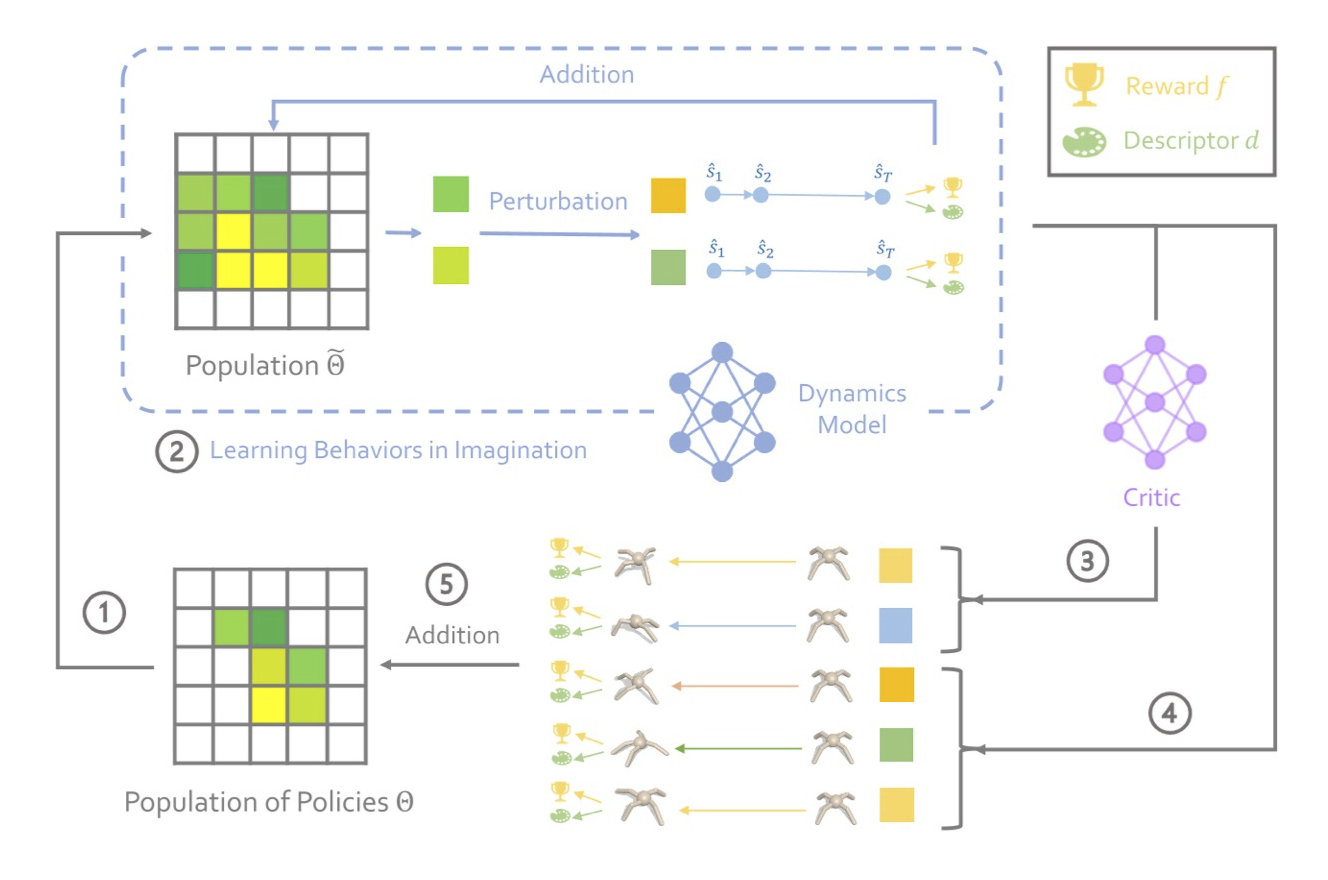
Efficient Exploration using Model-Based Quality-Diversity with GradientsBryan Lim*, M.Flageat*, A. Cully Conference on Artificial Life (ALIFE), 2023 Deep Reinforcement Learning Workshop, NeurIPS, 2022 (arXiv) (video) |
|
Neuroevolution is a Competitive Alternative to Reinforcement Learning for Skill DiscoveryF. Chalumeau*, R. Boige*, Bryan Lim, V. Macé, M. Allard, A. Flajolet, A. Cully, T. Pierrot International Conference on Learning Representations (ICLR) (Spotlight), 2023 (arXiv) |
|
Efficient Learning of Locomotion Skills through the Discovery of Diverse Environmental Trajectory Generator PriorsShikha Surana*, Bryan Lim*, Antoine Cully International Conference on Robotics and Automation (ICRA), 2023 (arXiv) |
|
Accelerated Quality-Diversity through Massive ParallelismBryan Lim, Maxime Allard, Luca Grillotti, Antoine Cully Transactions on Machine Learning Research (TMLR), 2023 Agent Learning in Open-Endedness Workshop, ICLR (Spotlight), 2022 The Genetic and Evolutionary Computation Conference (GECCO) - Poster, 2022 (arXiv) (code) |
|
Learning to Walk Autonomously via Reset-Free Quality-DiversityBryan Lim*, Alexander Reichenbach*, Antoine Cully The Genetic and Evolutionary Computation Conference (GECCO), 2022 Agent Learning in Open-Endedness Workshop, ICLR, 2022 (arXiv) (project page) |
|
Dynamics-Aware Quality-Diversity for Efficient Learning of Skill RepertoiresBryan Lim, Luca Grillotti, Lorenzo Bernasconi, Antoine Cully International Conference on Robotics and Automation (ICRA), 2022 (arXiv) (code) (project page) |

|
Tactile object pose estimation from the first touch with geometric contact renderingM Bauza, E Valls, Bryan Lim, T Sechopoulos, A Rodriguez Conference on Robot Learning (CoRL), 2020 (arXiv) (video) (project page) |

|
Robust Autonomous Navigation of a Small-Scale Quadruped Robot in Real-World EnvironmentsT Dudzik, M Chignoli, G Bledt, Bryan Lim, A Miller, D Kim, S Kim International Conference on Intelligent Robots and Systems (IROS), 2020 (paper) |
|
Vision aided dynamic exploration of unstructured terrain with a small-scale quadruped robotD Kim, D Carballo, J Di Carlo, B Katz, G Bledt, Bryan Lim, S Kim International Conference on Robotics and Automation (ICRA), 2020 (video) (paper) |
Journal Papers |
|
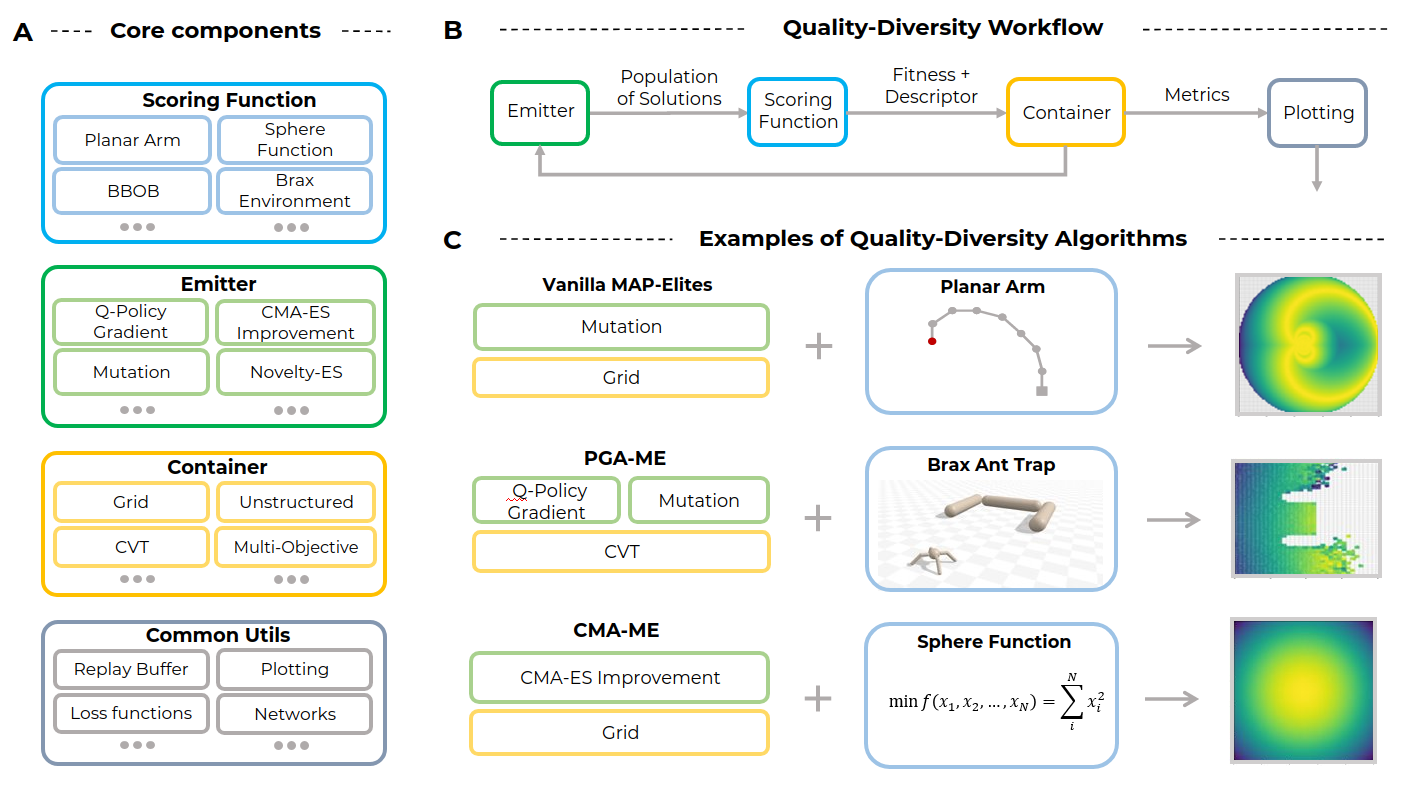
QDax: A Library for Quality-Diversity and Population-based Algorithms with Hardware AccelerationFelix Chalumeau*, Bryan Lim*, Raphaël Boige, Maxime Allard, Luca Grillotti, Manon Flageat, Valentin Macé, Guillaume Richard, Arthur Flajolet, Thomas Pierrot, Antoine Cully Journal of Machine Learning Research (JMLR) - MLOSS, 2024 (code) (paper) |

|
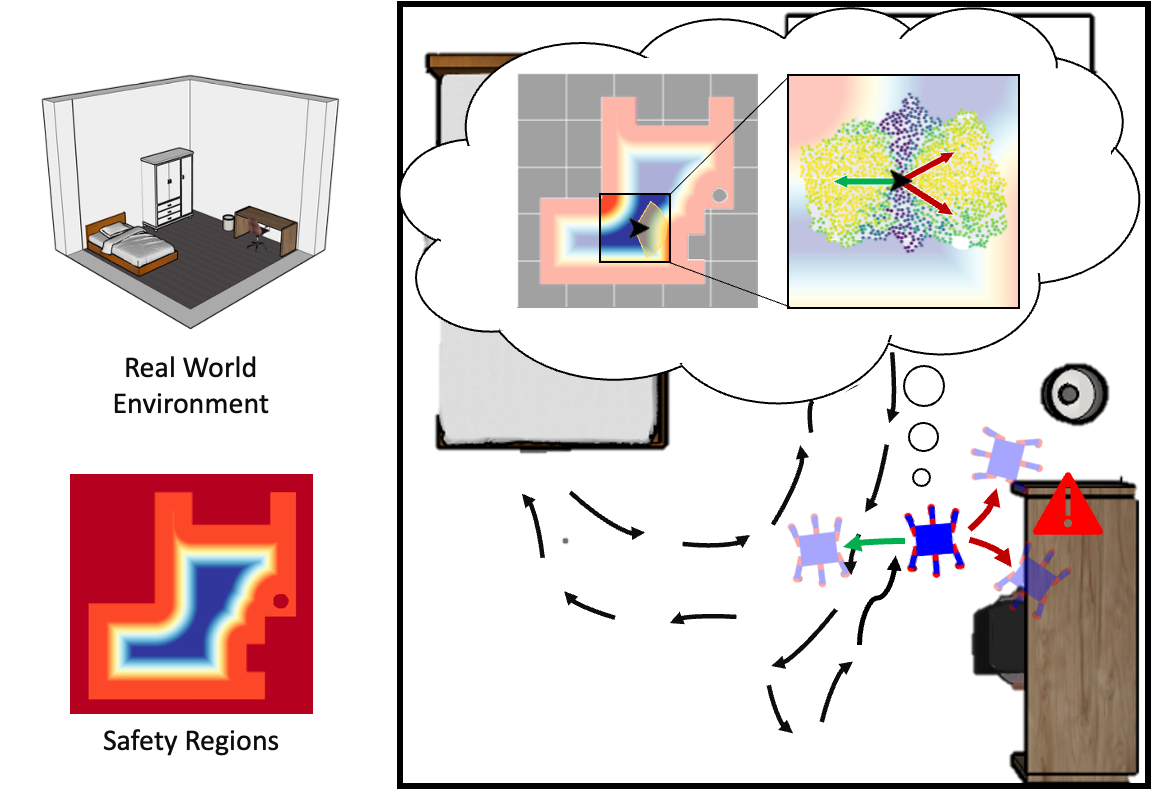
Online Damage Recovery for Physical Robots with Hierarchical Quality-DiversityM. Allard, S. C. Smith, K. Chatzilygeroudis, Bryan Lim, A. Cully ACM Transactions on Evolutionary Learning and Optimization (TELO), 2023 (arXiv) |
Workshop Papers |

|
Benchmarking Quality-Diversity Algorithms on Neuroevolution for Reinforcement LearningM. Flageat*, Bryan Lim*, L. Grillotti, M. Allard, S. C. Smith, A. Cully Quality Diversity Algorithm Benchmarks Workshop, GECCO, 2022 (arXiv) |
Teaching
|
|
Design and source code from Jon Barron's website and Leonid Keselman's Jekyll fork |